Description
AXIS#.VL.KP sets the proportional gain of the velocity loop.
The idealized velocity loop bandwidthIn computer networking, bandwidth often refers to a data rate measured in bits/s, for example, network throughput. The reason for the connection of data rate with the term bandwidth is that the limit to the data rate of a physical communication link is related to its bandwidth in hertz in Hz is:
Rotary motor:
BandwidthIn computer networking, bandwidth often refers to a data rate measured in bits/s, for example, network throughput. The reason for the connection of data rate with the term bandwidth is that the limit to the data rate of a physical communication link is related to its bandwidth in hertz (Hz) = AXIS#.VL.KP *Kt/ (2π *Jm)
Where:
Kt= motor torqueTorque is the tendency of a force to rotate an object about an axis. Just as a force is a push or a pull, a torque can be thought of as a twist constant, in units of Nm/Arms
Jm = motor inertia, in units of kg*m²
Linear motor:
Bandwidth (Hz) = AXIS#.VL.KP * Kt / (Motor Pitch (mm) * Jm)
Where:
Kt= motor torque constant, in units of Nm/Arms
Jm = motor inertia, in units of kg
The drive uses the same control loop for both linear and rotary motors. AXIS#.VL.KP units are in Arms /(rad/s). If you want to tune in units of Arms/(mm/s), then you must manually convert the units.
The diagram below shows how linear motors are implemented at the control loop level.
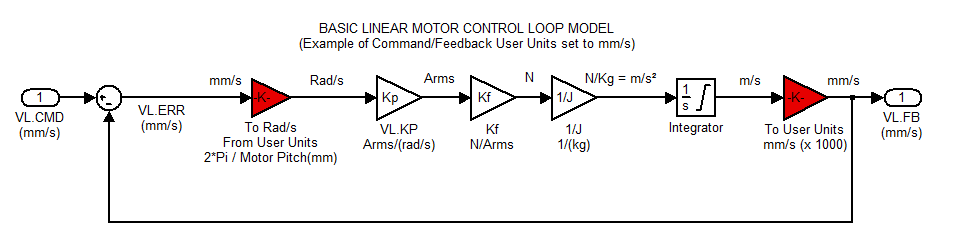
The red blocks are automatically handled at the drive level.
2π radians is the linear equivalent of one full mechanical revolution of a rotary motor - and is equal to the AXIS#.MOTOR.PITCH of a linear AXIS#.MOTOR.
Example
To convert AXIS1.VL.KP = 0.320 Arms/(rad/s) to Arms/(mm/s), where AXIS1.MOTOR.PITCH is 32 mm:
AXIS1.VL.KP = 0.320 Arm /rad/s * (2π rad / 32mm AXIS1.MOTOR.PITCH)
AXIS1.VL.KP = 0.32 * 2π / 32 = 0.063 Arms / (mm/s)
Versions
| Action | Version | Notes |
|---|---|---|
| Implemented | 02-00-00-000 |
General Information
|
Type |
Read/Write |
|
Units |
A/(rad/sec) |
|
Range |
0 to 2,147,483.008 |
|
Default Value |
0 |
|
Data Type |
Float |
|
Stored in Non Volatile Memory |
Yes |
Variants Supported
All variants are supported
Fieldbus Information
| FieldbusA Fieldbus is an industrial network system for real-time distributed control (e.g. CAN or Profibus). It is a way of connecting instruments in a plant design | Parameter | Index | Sub-Index | Data Type | Float Scale | Units | Access | PDO Mappable |
|---|---|---|---|---|---|---|---|---|
| EtherCATEtherCAT is an open, high-performance Ethernet-based fieldbus system. The development goal of EtherCAT was to apply Ethernet to automation applications which require short data update times (also called cycle times) with low communication jitter (for synchronization purposes) and low hardware costs COE and CANopen | AXIS1.VL.KP | 0x5011 | 0x1 | DINT | 1000:1 | - | RW | False |
| AXIS2.VL.KP | 0x5111 | 0x1 | DINT | 1000:1 | - | RW | False |
|
Stay Connected with Kollmorgen       
|
Copyright © 2018 Kollmorgen |
|